29 ноября 2025 г. — Граница между любительскими коптерами и промышленными беспилотными системами окончательно стерлась. Если еще пару лет назад программный стек PX4 Autopilot ассоциировался исключительно с дорогими корпоративными дронами и сложными исследовательскими проектами, то сегодня ситуация кардинально изменилась. Появление доступного, но мощного железа, такого как полетные контроллеры на базе процессоров STM32H7, в сочетании с обновлениями QGroundControl, сделало технологии профессионального уровня доступными для широкого круга энтузиастов и коммерческих операторов.
В этом материале мы разбираем ключевые этапы настройки дрона на базе PX4, анализируем выбор компонентов и — что критически важно в 2025 году — рассматриваем вопросы нормативного соответствия и безопасности.
Почему это важно сейчас?
PX4 — это «золотой стандарт» в индустрии коммерческих БПЛА, используемый такими гигантами, как Auterion и Holybro. В отличие от Betaflight, ориентированного на гонки, PX4 ставит во главу угла надежность, предсказуемость и автоматизацию миссий. Правильная настройка этого стека позволяет избежать типичных ошибок: от проблем с пайкой до «улета» дрона из-за некорректной калибровки компаса.
1. Выбор железа: баланс цены и производительности
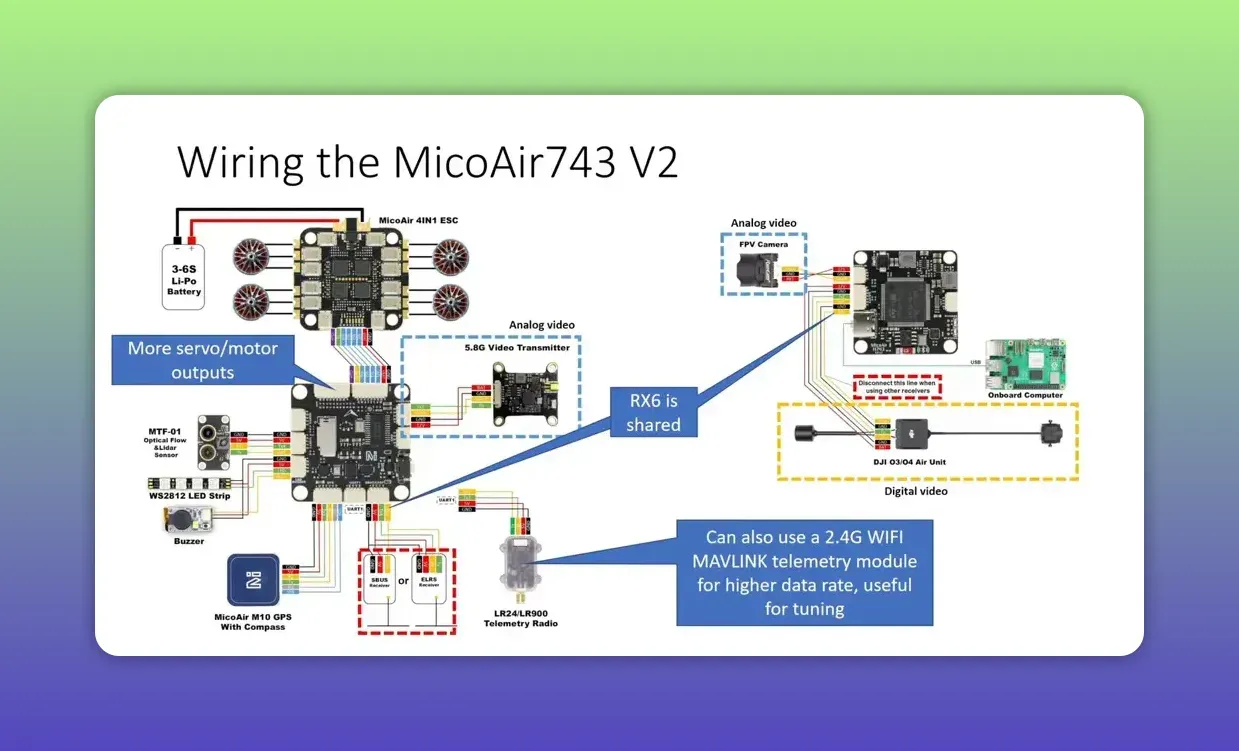
В центре внимания сообщества в этом году — контроллер Miko Air 743 V2. Это яркий пример того, как high-end характеристики стали доступными. Построенный на мощном чипе STM32H743, он обладает достаточной вычислительной мощностью для работы с новейшими алгоритмами PX4 v1.16, включая улучшенную фильтрацию шумов и интеграцию с ROS 2.
Ключевые характеристики сборки:
- Полетный контроллер: поддержка PX4, ArduPilot, Betaflight и iNav.
- ESC (Регуляторы оборотов): использование стека 4-в-1 (например, 55A) позволяет сэкономить вес и упростить разводку питания, делая сборку компактной.
- Протоколы: поддержка DShot 300 для надежной связи с моторами.
2. Подключение и UART: внимание к деталям
Одной из самых частых причин проблем при сборке остается неправильная коммутация. PX4, в отличие от более простых систем, жестко привязывает определенные периферийные устройства к конкретным UART-портам по умолчанию. Переназначение возможно, но требует времени и глубоких знаний параметров.
«Экономьте время — подключайтесь к ожидаемым портам и избегайте бессмысленного поиска неисправностей», — советуют эксперты по настройке.
Важный нюанс для владельцев цифровых систем FPV: на платах типа Miko Air 743 разъем для цифрового видео (например, DJI O3) может делить ресурсы (RX6) с приемником управления. Если вы подключаете DJI O3 Air Unit, необходимо удалить провод SBUS из разъема видеосистемы, иначе ваш основной RC-приемник не будет распознан контроллером.
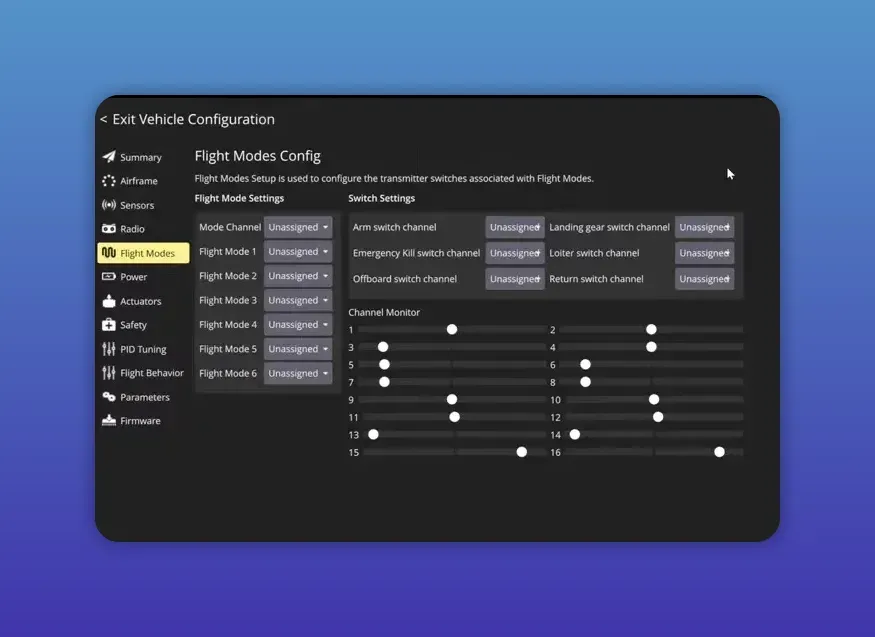
3. Программная настройка в QGroundControl
Процесс настройки в QGroundControl (QGC) в 2025 году стал более интуитивным, но требует строгого соблюдения последовательности действий.
Выбор рамы и прошивка
Первый шаг — загрузка актуальной стабильной версии PX4 (на данный момент актуальна ветка v1.16). После прошивки необходимо выбрать тип рамы (Airframe). Для стандартных квадрокоптеров выбирается конфигурация «Generic Quad X».

Калибровка сенсоров: «Танец с компасом»
Это критический этап для безопасности полетов, особенно в режимах GPS (Position Mode).
- Компас: калибровать строго на улице, вдали от металлических конструкций и железобетона. Снимите с рук часы и украшения. Процедура требует вращения дрона по всем осям.
- Гироскоп и Акселерометр: гироскоп калибруется на неподвижной поверхности. Для акселерометра требуется фиксация дрона в шести положениях.
Настройка моторов и ESC
Для PX4 рекомендуется использовать протокол DShot 300. Использование более быстрого DShot 600 не дает преимуществ для алгоритмов управления PX4, но повышает риск возникновения помех.
В QGC встроен удобный инструмент для проверки направления вращения моторов. Снимите пропеллеры (обязательно!), подключите батарею и используйте вкладку Actuators для проверки соответствия реальных моторов схеме на экране.

4. Регулирование и Безопасность (2025)
Сборка дрона — это только половина дела. В 2025 году эксплуатация беспилотников строго регламентирована во всем мире. Игнорирование этих правил может привести к серьезным штрафам.
Remote ID и Учет БВС
Современные версии PX4 (начиная с v1.14 и новее) имеют встроенную поддержку модулей Remote ID (OpenDroneID), что является обязательным требованием в США (FAA Part 89) и ЕС.
В Российской Федерации действуют строгие правила учета и эксплуатации:
- Регистрация: все БВС массой более 150 г подлежат обязательному государственному учету. Заявление можно подать через Портал Госуслуг или сайт Росавиации.
- Remote ID в РФ: с 1 марта 2025 года вступили в силу новые требования, обязывающие оснащать дроны средствами удаленной идентификации для выполнения визуальных полетов.
- Геозоны: перед полетом обязательно сверяйтесь с картами зон ограничений полетов (No-Fly Zones). В QGroundControl можно настроить «Геофенсинг» (Geofence) — виртуальный забор, который не позволит дрону улететь дальше или выше заданных параметров (например, 500м радиус и 120м высота).
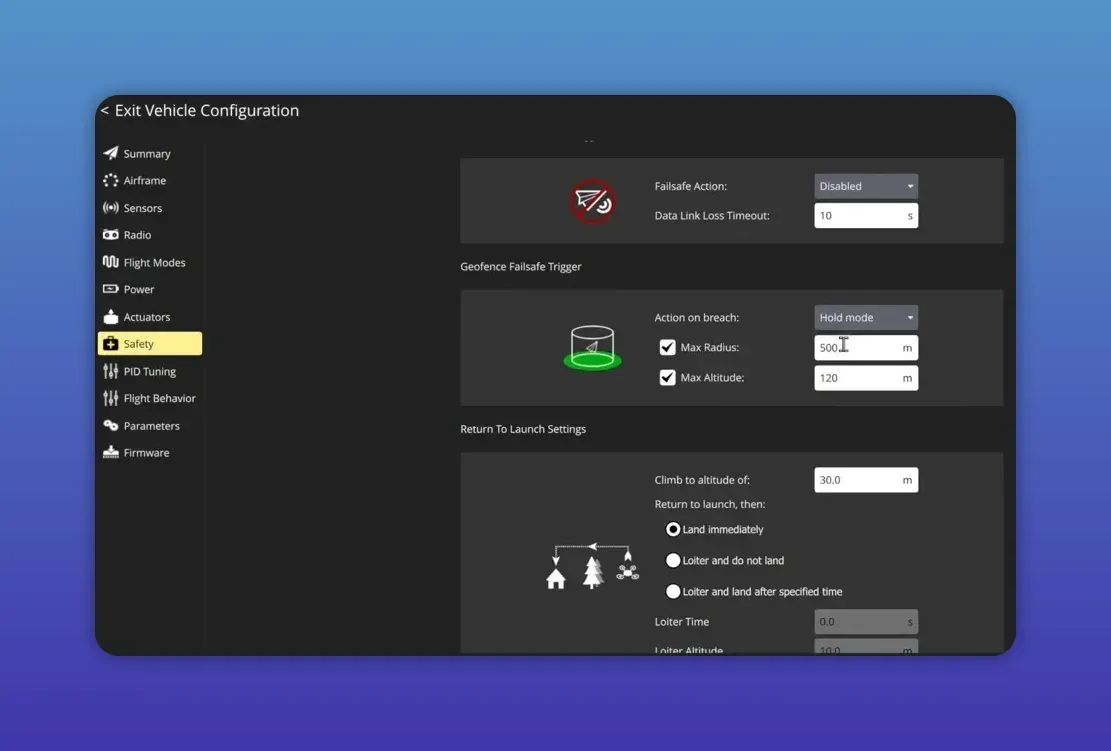
Failsafe: ваша страховка
Настройка аварийных режимов (Failsafe) обязательна до первого взлета:
- Low Battery: настройте предупреждение на 15%, возврат домой (RTL) на 7% и аварийную посадку на 5%.
- RC Loss (Потеря связи): установите режим RTL (Return to Launch).
- Kill Switch: назначьте отдельный тумблер для мгновенного отключения моторов. В критической ситуации лучше уронить дрон в траву, чем допустить его неконтролируемый улет.
Заключение
Использование PX4 на доступном оборудовании открывает огромные возможности для создания надежных, полуавтономных систем для аэрофотосъемки, инспекций или сельского хозяйства. Главное — подходить к сборке системно: от правильной пайки до настройки параметров безопасности в QGroundControl. И помните: в 2025 году техническая исправность дрона неотделима от его правовой легитимности.
Статья подготовлена на основе материалов блога Unmanned Tech и официальной документации PX4.